大疆精灵4rtk如何使用ppk模式大疆精灵4 RTK 在固件升级后可以使用 PPK 模式ppkrtk区别,以下为具体操作步骤1 确保飞行器已经进行了固件升级ppkrtk区别,版本达到 V02000600 以上2 在飞行前ppkrtk区别,先将 GNSS 数据记录器插入到飞机的 USB 端口中,并在 DJI GO 4 APP 中选择 PPK 模式进行设置3 开始飞行前。
RTK是一种厘米级实时差分技术,PPK是一种后处理差分技术,定位精度PPK会略高于RTK,但二者都是厘米级定位当用户对操作的便捷性与实时性要求较高,且周围有通常的通信链路与环境时,推荐用户使用RTK若用户对于实时性没有要求或处于网络通信链路欠佳的环境下,可以使用PPK后差分技术。
PPK数据并记录精确位置姿态置信度镜头标定参数等,提供精准航测影像输出,支持各种任务场景下的作业与后处理需求结合遥控器内置APP以及PC地面站专业版,同时可扩展第三方专业建模软件,组成完整的软硬件解决方案,大幅降低航空摄影测量使用复杂度。
PPK和RTK的应用和精度不同,PPK的优点是不用电台数据链连接基站和流动站,但精度低,只能进行数据采集,不能实时放样RTK要用电台,受电台数据链的限制,需要在一定的作业范围内测量,但精度高,可以实时放样更多细节建议查看一下人民交通出版社的GPS RTK测量技术实用手册一书。

无人机带RTK和不带RTK的区别在于定位精度定位频率通信需求和作业距离带有RTK功能的无人机利用实时差分全站仪技术,可以实现厘米级别的精准定位RTK技术通过电台或网络通信模块实时提供位置信息,但定位频率受限,难以满足高速飞行的需求另一方面,带有PPKPostProcessing Kinematic功能的无人机可以。
PPK技术,即动态后处理技术,是一种利用载波相位进行事后差分的卫星定位技术这种技术与RTK实时载波相位差分定位技术既存在共通之处,也有其独特之处它能够作为RTK技术的有效补充PPK技术的主要作业过程包括外业观测数据的采集和内业数据的处理PPK技术系统同样由基准站和流动站两部分组成其中,基准站。
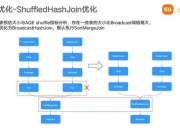
在使用大疆精灵4RTK过程中,通过组照片模式生成的数据文件包括PPKRAWbinEVENTLOGbinRinexobs以及TimestampsMRK这些文件包含了移动端卫星观测值数据星历数据曝光时间戳记录文件以及实时转码出的RInex观测值文件,为后续处理PPK数据提供了所需原始资料PPK处理流程分为两个主要步骤数据转码与。

本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。

天下羽球为球友提供及时、实用的信息服务,致力于成为羽毛球文化的传播者,欢迎关注、留言或投稿 (来源:羽毛球之家) 球场上的素养 无非就是 关注对手和搭档的感受,照顾他们的情绪 不论输赢,都让打球的双方感到愉快和舒服 只要认真练习,有100种办法,成为羽球高手 好的素养,只有做好以下8点才行 (敲黑板,记笔记啦!) 一、尊重专业,尊重规则 一旦走进球馆,就请尽量规范自己的动作,这是对球友的尊重; 对抗或者比赛,也请尊重羽球规则,这是对羽毛球运动的尊重。...

平的不败佳绩,并且本赛季在主场面对中上游球队时胜率高达 80%鉴于国际米兰必须全力争胜以维系争冠之希望,而拉齐奥虽客场能。 国际米兰在主场进行的欧冠比赛中保持了不败的战绩15场欧冠主 而这场比赛的结果,也将为球迷们带来更多的期待和悬念对于球。 今晨,国际米兰主场以1比0险胜AC米兰,第290次米兰德比国米险胜,在意甲积分榜上,国米3战全胜积9分领跑,AC米兰1胜2负积3分排名第12位注图片来源于网络 任何领域的发展都不可获缺“英雄式”的人物或团体素有“米兰双雄”之称的国际米...

1、加蓬球员以热情认真敬业的职业态度著称,常常在球场上拼尽全力争取胜利这种职业态度赢得了球迷的喜爱和尊重,为加蓬足球赢得了良好的声誉对加蓬足球的贡献加蓬球员的出色表现为加蓬国家足球队注入了新的活力和希望他们的成功也激励着更多年轻的加蓬球员投身足球事业,为加蓬足球的未来做出贡献。 2、摩洛哥的这一点,葡萄牙队最应该学习,葡萄牙队应该和摩洛哥队一样,在重大赛事时,减少内耗,全力对外,争取好成绩非洲历史非洲历史上最强球队,摩洛哥队当之无愧摩洛哥队虽然说已经失去了夺冠资格,但他们距离...

2 突破技术保罗的突破绝对速度并不快,他更善于用节奏第一步就过了对手,然后利用假动作分散防守队员注意力去完成上篮,他的上篮选择非常聪明,所以被盖率一直是联盟后卫里最低的之一,在身体完全健康的时候,保罗的突破更加偏“暴力”,从大伤好了以后少了半块半月板,他减少了自己的突破,更加注重对球队的组织不过只要球队需要的时候。 4达拉斯小牛Dallas Mavericks1980年3月,球队老板在征集来的大约四千六百个名称中,选中“小牛”为球队的队名 5萨克拉门托国王Sacramento...

17款奔驰GLS450对下进气格栅进行了更加运动化的调整。前保险杠两侧开口更大,同时下唇采用银色镀铬进行装饰,并带有扰流槽设计。GLS采用了全新家族设计语言。双幅飞翼式镀铬条横贯进气格栅,并进行了镂空实心的三叉星徽,更显尊贵。下进气格栅的镀铬装饰面积加大,两侧取消雾灯设计,更具运动感。 外观方面:2017款奔驰GLS450时尚的外观设计,强劲的动力性能,尽显轩昂大气风范。外观方面改变主要集中在细节部分,家族化风格在这里十分明显,由内而外彰显出豪华/动感。车身上采用的全新...

1994年以后,范德海格加盟了安德莱赫特,这是他职业生涯中的一个重要转折点他在199495赛季至200102赛季间,共为安德莱赫特出场214场,攻入了多个进球这段时期是他职业生涯的巅峰,他在比利时联赛中的排名也不断提升直到200708赛季,范德海格还在鲁瑟拉勒效力,尽管年岁已高,但他仍然贡献。 安德莱赫特时期范登代勒在安德莱赫特期间多次代表球队出战,表现稳定,尽管有时出场次数较多,但进球数未详细列出兰斯体育场范登代勒在兰斯体育场开始了新的旅程,该赛季他出场15次,但球队在法国...





发表评论